
人类想要实现一系列的基本活动,如生活、工作、学习就必须依靠自身的器官,除脑以外,最重要的就是我们的眼睛了,(也不例外,要完成正常的生产任务,没有一套完善的,先进的视觉系统是很难想象的。
机器视觉系统是利用机器代替人眼来作各种测量和判断。它是计算科的一个重要分支,它综合了光学机械电子、计算机软硬件等方面的技术,涉及到计算机、图像处理、模式识别、人工智能信号处理、光机电一体化等多个领域。图像处理和模式识别等技术的加快速度进行发展,也大大地推动了机器视觉的发展。
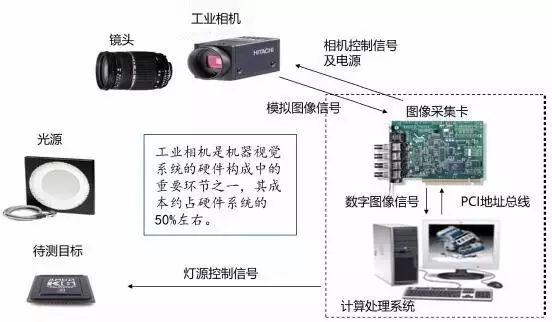
一般来说,机器视觉系统包括了照明系统、镜头、摄像系统和图像处理系统。对于每一个应用,我们都需要仔细考虑系统的工作速度和图像的处理速度、使用彩色还是黑白摄像机、检测目标的尺寸还是检测目标有无缺陷、视场需要多大、分辨率需要多高、对比度需要多大等。
从功能上来看,典型的机器视觉系统能分为:图像采集部分、图像处理部分和运动控制部分。
1、非接触测量,对于观测者与被观测者都不可能会产生任何损伤,来提升系统的可靠性。
2、具有较宽的光谱响应范围,例如使用人眼看不见的红外测量,扩展了人眼的视觉范围。
3、长时间稳定工作,人类难以长时间对同一对象进行观察,而机器视觉则可以长时间地作测量、分析和识别任务。
4、机器视觉系统的应用领域愈来愈普遍。在工业、农业、国防、交通、医疗、金融甚至体育、娱乐等等行业都获得了广泛的应用,可以说已经深入到我们的生活、生产和工作的方方面面。
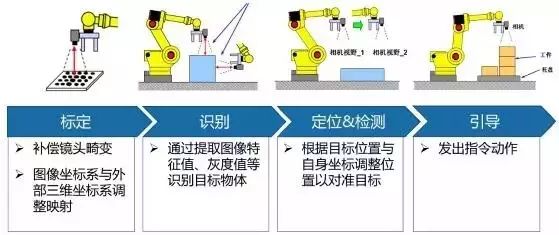
视觉系统简单来说就可以用三个及独立又相互联系的模块来概括:目标物图像的采集、图像的处理、指令的发出。
视觉系统的硬件主要由镜头、摄像机、图像采集卡、输入输出单元、控制装置构成。
一套视觉系统的好坏则分别取决于摄像机像素的高低,硬件质量的优劣,更重要的是各个部件间的相互配合和合理使用。
视觉系统的软件设计是一个复杂的课题,不仅要考虑到程序设计的最优化,还要考虑到算法的有效性,及其能否实现,在软件设计的过程中要考虑到也许会出现的问题。
视觉系统的软件设计完成还要对其鲁棒性进行仔细的检测和提高,以适应复杂的外部环境。
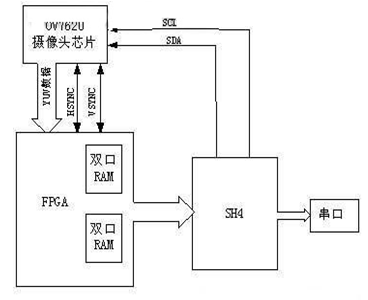
机器人视觉硬件最重要的包含图像获取和视觉处理两部分,而图像获取由照明系统、视觉传感器模拟-数字转换器和帧存储器等组成。机器人视觉通过视觉传感器获取环境的二维图像,并通过视觉处理器做多元化的分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置。
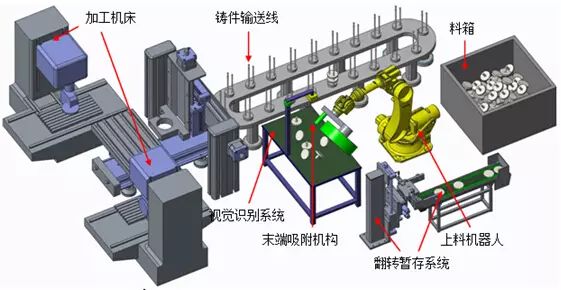
工业机器视觉难点在于精度和速度,要求都在毫米级,且工业领域工业机器人抓手的变动是在三维空间内。根据功能不同,机器人视觉可分为视觉检验和视觉引导两种。
在流水化作业生产、产品质量检验方面,需要机器视觉观察、识别、发现生产环节中的错误和疏漏。
机器视觉系统的特点是提高生产的柔性和自动化程度。在一些不适合于人工作业的危险工作环境或人工视觉难以满足规定的要求的场合,常用机器视觉来替代人工视觉;
同时,在大批量工业生产过程中,人工视觉效率低且精度不高,机器视觉检测能大大的提升生产效率和生产的自动化程度,且易于实现信息集成。
太阳能电池和模块生产者使用机器视觉来检测产品、识别和跟踪产品以及装配产品。
在交通监控领域,可应用于车牌识别技术、图像分析技术,自动识别车牌,发现违章停车、逆行、发现交通肇事车辆等。
传统制造业面临新的颠覆,转变发展方式与经济转型将给中国自动化行业带来非常大的市场机遇。而机器视觉作为自动化界高智能化产品,未来具有巨大的发展潜力。
中国的电子制造和代工厂商过去几年正在采购大量自动化设备取代人工,以应对中国愈演愈烈的缺工现象,未来几年这一现象将达到高潮。台资工厂纷纷选择提高自动化程度,其自动化换装高潮将在未来2-3年内到来,必将为机器视觉产品在该行业的应用带来新的增长点。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

增加了新的维度,它能够给大家提供装配线上零件的尺寸、位置和方向。而合适的镜头选择对于
),来代替人眼的测量、检测和判断。其原理是由计算机、图像处理器以及相关设备来模拟人的
基本配置包含工业相机与镜头,决定拾取图像的清晰度;光源,作为辅助成像器件,对成像质量
通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、
能够工作于人类生活环境的重要条件。在工作中图像采集速度较低,以及图像处理要比较长时间,给
】是一种可拿来移动材料,零件,工具或特定装置的能重新编程的多功能操...
的感知传感器。这还在于原来的超声或红外传感器感知信息量有限,鲁棒性差,而
导向等方面的工作,特别是在那些需要重复、迅速的从图象中获取精确信息的场合。
层次的模块,一个叫做全局规划,这个和我们车载导航仪有一点像,它需要在地图上预先规划一条线路,也要有当前
的实时定位与自动建图问题,那么,在实际应用时,SLAM究竟是怎么来实现的呢?在实现过程中有哪些难点?这是一个完整的SLAM和导航
为核心,将机械、气动、运动控制、变频调速、编码器技术、PLC控制技术有机地进行整合,结构模块化,便于
抓取工作站,因抓取物品为乱序堆叠的毛坯零件,且零件不唯一,所以要一定的
动作。这是一个平台类的产品设计工程,调整程序就可适用于相关的娱乐,教学,护理等
寻找视野中的水果,并移动到相应的位置,由机械臂进行采摘水果并放到指定的位置。
抓取工作站,因抓取物品为乱序堆叠的毛坯零件,且零件不唯一,所以要一定的
` 本帖最后由 wangjiamin2014 于 2014-8-4 11:34 编辑 随着计算机科学和自动控制技术的发展,慢慢的变多的不一样的种类的智能
已经被应用于许多领域。在许多自动化的生产线上,最后一道工序就是把产品摆放整齐,然后打包成型,而许多行业的产品体积
是制造业的高端制造设备,对于稳定性、定位精准度的要求比较高,因此就需要借助
技术处理图像。通过工业相机实现引导定位和模式识别等操作,快速获取物体的质心和边界,满足工业
”特征的算法,同时根据学习到的“经验数据”,从而能把图片中的猫都识别出来。基于“
大多采用以图形工作站为中心,由图形工作站完成图像的采集、处理、跟踪控制,再通过RS232等接口控制执行机构
,都采用单片机作为控制单元,以8位和16位最常见,其处理速度较低,没有操作
为核心,将机械、气动、运动控制、变频调速、编码器技术、PLC控制技术有机地进行
历史并不长,但现在在价格、性能和可靠性上已发展到能够适用于一些应用中,而仅仅几年前这些应用都还是没办法实现的。使用
中应用十分普遍,主要集中于药品检测分装、印刷色彩检测、集成电路生产、精密电子科技类产品装配、智能
已经走到行业的前沿, 他们的主要特征是能够安全地协助人类工作。在网上有很多人谈论它们,但你认线
已经走到行业的前沿, 他们的主要特征是能够安全地协助人类工作。在网上有很多人谈论它们,但你认线年,很多人爱它们只是处于好奇心。在2012年,
,是通过光学装置和非接触式的传感器,自动地接收和处理一个真实物体的图像,以获得所需信息或用于控制
功能,也就是用计算机来实现对客观的三维世界的识别。人类接收的信息70%以上来自
开发计划面对老龄化高龄化时代的来临,尊老爱幼, 关爱老人也是我们中华儿女几千年来的传统美德!我们深圳江智
]是通过光学装置和非接触式的传感器,自动地接收和处理一个真实物体的图像,以获得所需信息或用于控制
定位、尺寸测量和外观检测着四大类组成,像是无人驾驶、人脸识别等等这些都可以归为
功能,也就是用计算机来实现对客观的三维世界的识别。人类接收的信息70%以上来自
。一个人想要完成一系列的基础活动,比如日常的工作、生活、学习运动等等,都需要借助自己身体的器官,除了大脑之外,最重要的就是我们的双眼,(工业生产)智能






